NiLiBoRo – Ein Roboter-Wurm, der sich um Ecken fräsen kann, soll zukünftig Operationen am Kopf revolutionieren
Operationen am Kopf sind oftmals eine heikle Angelegenheit. Während einerseits massive Knochen das Innere des Kopfes schützend umgeben, durchziehen viele Blutgefäße und empfindliche Nerven das umliegende Gewebe. Das erschwert die Behandlung beispielsweise von Tumoren im Innenohr enorm. Oftmals müssen Mediziner bei der Entfernung eines solchen Tumors große Teile des Mastoid-Knochens herausnehmen, um sicherzustellen, bei der Operation keine Nerven oder Blutgefäße zu schädigen.
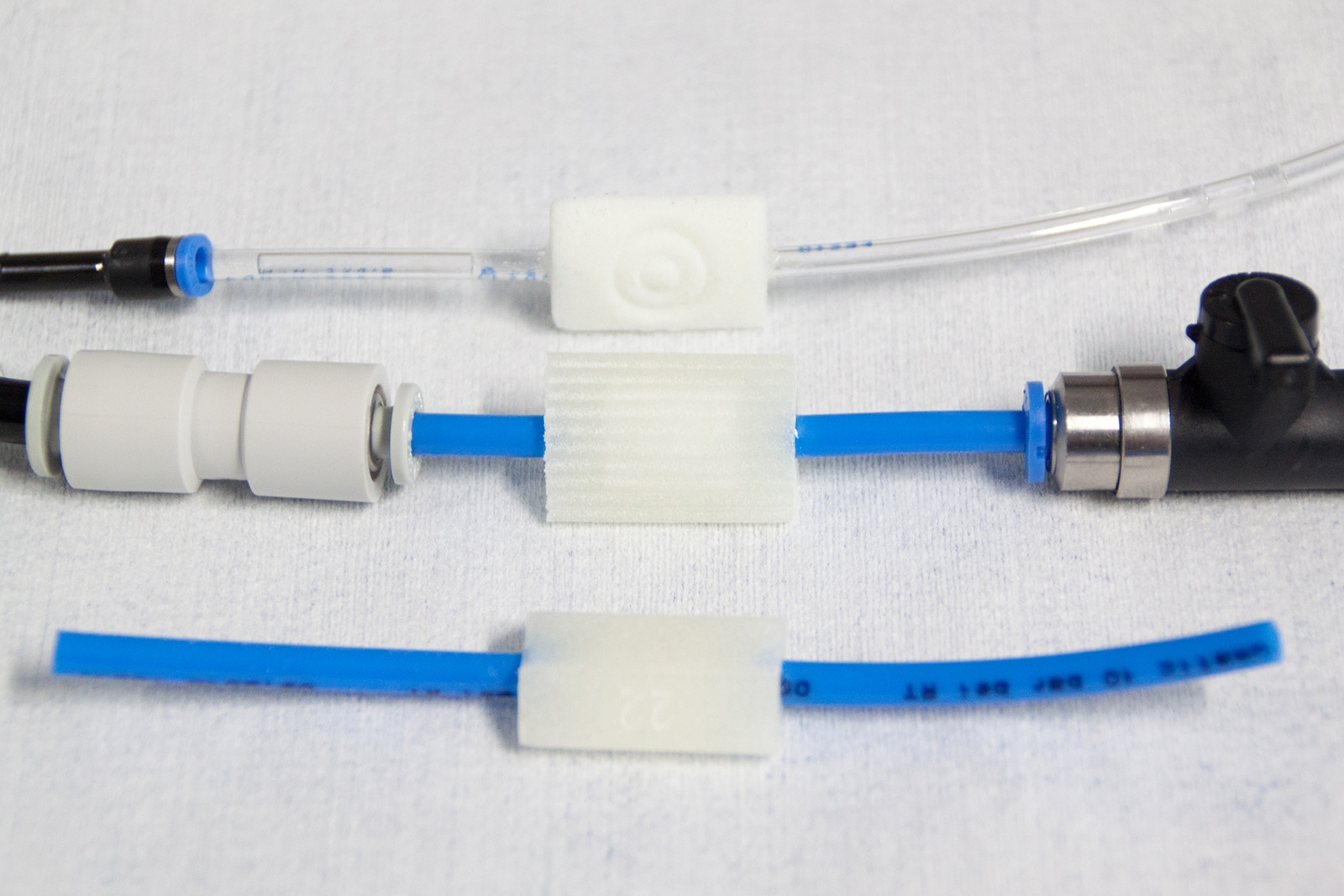
Mithilfe der aufpumpbaren Kissen wird NiLiBoRo bei der Operation fixiert. Zunächst entwickeln die Forscher die optimale Taschengeometrie mit mehreren Prototypen. (Foto: Fraunhofer IPA)
Mit Hilfe des NiLiBoRo – kurz für Nicht-Linearer Bohr-Roboter – soll dies zukünftig schonender möglicher sein. Forscher der Mannheimer Projektgruppe für Automatisierung in der Medizin und Biotechnologie des Fraunhofer-Instituts für Produktionstechnik und Automatisierung IPA haben ihn gemeinsam mit ihren Kollegen der Technischen Universität Darmstadt, der Universität Aachen und des Universitätsklinikums Düsseldorf hierfür entwickelt. Sein großer Vorteil ist das nicht-lineare Bohren. Während bereits am Markt verfügbare Bohrer sich ihren Weg schnurgerade durch den Knochen bahnen, kann der NiLiBoRo im wahrsten Sinne des Wortes „um die Ecke bohren“, so Lennart Karstensen, Wissenschaftler der Projektgruppe. Dies ermöglicht es, die Operationen von Innenohrtumoren zukünftig minimalinvasiv durchzuführen. Dafür fräst der NiLiBoRo einen Tunnel mit einem Durchmesser von 5 Millimeter in den Schädelknochen und ist dabei in der Lage einen Bogen um empfindliche Stellen zu machen. Dieses Loch ist schließlich breit genug, um einen Tumor operativ sicher entfernen zu können, ohne das umliegende, sensible Gewebe zu schädigen.
Doch wie ist es möglich, dass sich ein Roboter in Kurven und sogar um Ecken durch den Knochen fräsen kann? Der Clou dahinter steckt im Design des Roboters, der die Form eines Wurms besitzt. „Der Wurm besteht aus einem ‚Kopf‘ und einem ‚Schwanz‘ “, erläutert Karstensen. „Diese beiden Teile sind über einen Faltenbalg flexibel miteinander verbunden.“ Der Aufbau erinnert an einen Gliederbus, bei dem der vordere und der hintere Teil durch eine schlauchartige Konstruktion gekoppelt ist, die einer Ziehharmonika ähnelt.

Vorbereitung einer Operation
Auf seinem Weg durch den Knochen ist der Roboter über acht bis zwölf hydraulische Leitungen mit den Steuerungsgeräten im Operationssaal verbunden. Mit Hilfe dieser Leitungen wird er gesteuert: Zunächst wird eine Hydraulikflüssigkeit in drei Kissen gepumpt, die sich am hinteren Teil befinden. Die Kissen füllen den Raum zwischen Wurm und Knochen und fixieren dadurch den hinteren Teil. Anschließend wird der Verbindungs-Balg in der Mitte gefüllt, wodurch der vordere Teil mit der Fräse gezielt tiefer in den Knochen gedrückt wird. Wenn dann die Hydraulikflüssigkeit aus dem hinteren Teil wieder abfließt, wird dieser dem Kopf nachgezogen, ähnlich wie bei einem lebendigen Wurm. Auf diese Weise arbeitet sich der NiLiRoBo stückweise vorwärts.
Einen ersten Prototyp des NiLiBoRo haben die Forscher bereits gebaut. Momentan ist er noch fünfmal größer als die geplante Endversion und besteht vorerst nur aus dem vorderen Teil samt Balg, dem Herzstück also. Schrittweise wollen die Wissenschaftler den Prototyp nun optimieren und erweitern. Steht die komplette Technik, soll NiLiBoRo auf seine endgültige Größe schrumpfen. In zwei Jahren, so hoffen die Forscher, könnten die Ärzte den Miniroboter erstmals testen.
Quelle und weiterführende Informationen: Fraunhofer IPA
NiLiBoRo
Pro
- absolut wichtige Entwicklung
Kontra
- braucht noch zwei Jahre